۲۴ شهريور ۱۴۰۱ - ۰۹:۱۳
ابداع ادراک شبهانسانی در خودروهای بدون راننده
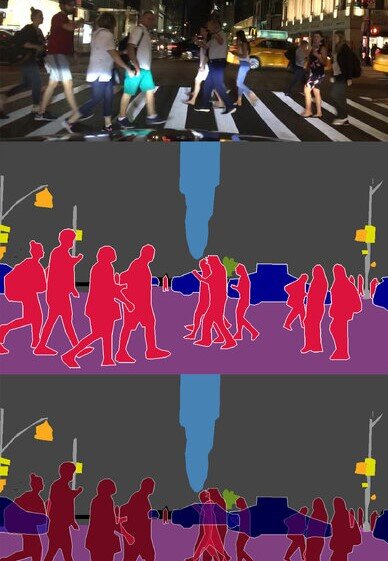
محققان با طراحی رویکردهای جدید در زمینه سامانههای راهبری هوشمند به خودروهای بدون راننده این امکان را می دهند که همانند انسان بتوانند شکل کامل اجسام و مناظر را حتی در صورت پنهان بودن بخشی از تصویر به طور کامل تصور کنند.


به گزارش گروه علم و آموزش ایران اکونومیست از تارنمای تکاکسپلور، رباتهای متحرک چگونه میتوانند محیط را بهدرستی مشاهده و درک کنند حتی زمانی که بخشی از محیط توسط اشیای دیگر مسدود شده است؟ این یک سوال کلیدی است که برای حرکت ایمن خودروهای خودران (بدون راننده) در شهرهای شلوغ باید حل شود.
انسانها قادر هستند ساختارهای فیزیکی را حتی زمانی که بخشی از آنها مسدود هستند و دیده نمیشوند را تصور کنند اما الگوریتمهای هوش مصنوعی در حال حاضر چنین توانایی را ندارند.
رباتهای با هوش مصنوعی زمانی که یاد بگیرند محیط آنها چه شکلی است، میتوانند راه خود را پیدا و مسیر را طی کنند. با این حال تصور ساختارهای کامل اشیا زمانی که بخشی از آنها پنهان است، مانند افراد در ازدحام یا خودروها در ترافیک یک چالش مهم بوده است.
دکتر آبیناف والادا و یکی از شاگرانش که از محققان رباتیک دانشگاه فرایبورگ هستند، یک گام مهم در مسیر حل این مشکل برداشتهاند. این دو محقق با رویکردهای جدید در زمینه هوش مصنوعی به سمت حل این مشکل گام برداشتهاند.
خودروهای بدون راننده تاکنون از روش دید همهنما (panoptic) برای شناخت محیط پیرامونی خود استفاده کردهاند که مطابق آن تنها میتوانند پیکسلهای مربوط به تصویرهای «مشهود» کامل را شناسایی و ارزیابی کنند اما در رویکرد جدید از شیوه «بخش بخش سازی همهنمای آمودال» (amodal panoptic segmentation) استفاده شده است که سامانه هوشمند را قادر به پیشبینی و تصور تمامیت شکل اشیاء می کند.
این محققان میگویند این رویکرد جدید در زمینه هوش مصنوعی میتواند به طور بالقوه سیستمهای راهبری هوشمند آینده را متحول کند.
منبع: خبرگزاری ایرنا

گزارش خطا
آخرین اخبار