۲۶ مرداد ۱۳۹۴ - ۱۲:۳۹
مشارکت روبات در خلق آثار هنری
این روزها تیمهای تحقیقاتی متعددی در اقصی نقاط جهان در حال طراحی و توسعهی روباتهایی برای انجام کارهای مختلف هستند؛ حال یک دانشجوی MIT بازوی روباتیکی طراحی کرده که با الگوبرداری از حرکات وی، در ترسیم اشکال به این هنرمند کمک میکند.
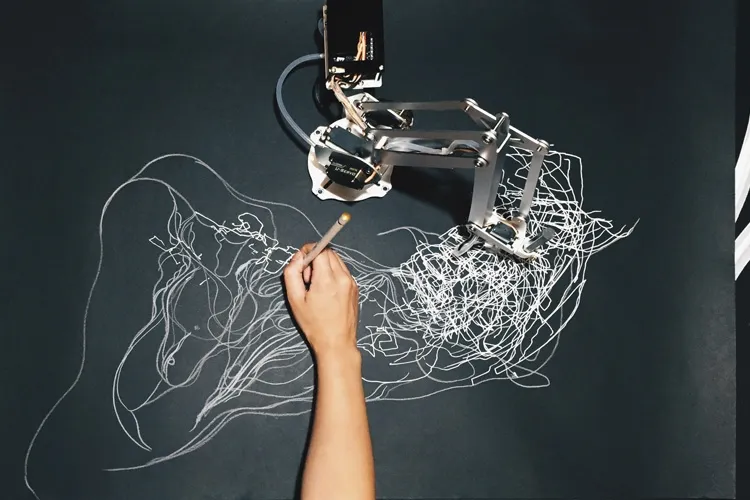

سوگون چونگ، یکی از دانشجویان در آزمایشگاه هنر دانشگاه انستیتو فناوری ماساچوست، بازوی روباتیکی را طراحی کرده که قادر است با الگوبرداری از حرکت دست و ژستهای حرکتی وی، در ترسیم یک شکل او را همراهی کند.
این بازوی روباتیک از یک دوربین که از فناوری بینایی ماشین بهره میبرد، استفاده میکند. استفاده از این فناوری این قابلیت را در اختیار بازوی روباتیک قرار میدهد تا حرکات دست چونگ رصد کرده و با کپی برداری از این حرکات به ترسیم اشکالی مشابه بپردازد. نتیجهی بکارگیری این بازوی روباتیک یک اثر هنری ترکیبی است که در آن انسان و ماشین نقش داشتهاند.
چونگ روند نقاشی کردن با این بازو را بسیار جالب میداند، چراکه وی برای همراهی بهتر بازو باید با توجه و به آرامی اقدام به ترسیم خطوط کند که به نوعی رابطهای از جنس ژستهای حرکتی بین وی و روبات برقرار میشود. چونگ در خصوص عملکرد این بازوی رویاتیک گفت:
زمانی که یک مشکل در کارکرد این روبات ایجاد میشود، عکسالعمل بسیار جالب است.
انجام یک حرکت با سرعت بالا میتواند این بازو را با مشکل درک حرکت روبرو کند که نتیجهی آن ترسیم یک خط به حالت دیگری است.
هدف نهایی از این پروژه، سنجش میزان یادگیری این بازوی روباتیک است. توسعه دهندگان در پی آن هستند تا ببینند آیا این روبات قادر است با توجه به آموختههای خود بصورت بداهه به نقاشی پرداخته و اثر هنری خود را بر جای بگذارد یا خیر.

گزارش خطا
آخرین اخبار