۱۶ بهمن ۱۴۰۱ - ۱۴:۴۳
مارمولک رباتیک کاوشگر مریخی میشود
دانشمندان یک مارمولک رباتیک توسعه دادهاند که میتوان آن را برای انجام اکتشافات فضایی به سطح مریخ فرستاد.

به گزارش ایران اکونومیست و به نقل از تکاکسپلوریست، پیشرفت در حوزه فناوری فرصتهای هیجانانگیزی برای اکتشافات فضایی فراهم کرده است که به طور بالقوه میتوانند منجر به اکتشافات جدیدی در مورد اجرام آسمانی در کهکشان ما شود.
ثابت شده که رباتها ابزارهای امیدوارکنندهای برای کشف سیارات دیگر و به ویژه مریخ هستند که میزبان برخی از عناصر مشابه در زمین است.
کاوش مریخ و سطح آن یک جستوجوی جذاب است، زیرا میتواند نشانههایی از حیات فرازمینی در گذشته یا حال را آشکار کند. این اکتشافات علاوه بر پردهبرداری بالقوه از اشکال حیات میکروبی باستانی، میتواند به کشف منابعی منجر شود که خارج از زمین وجود دارند و به طور بالقوه راه را برای ماموریتهای آینده بشر به مریخ هموار میکنند.
محققان دانشگاه هوانوردی و فضانوردی نانجینگ(Nanjing) به تازگی یک ربات چهار پای جدید با الهام از مارمولکها ساختهاند که میتواند به کاوش در سطح سیاره سرخ کمک کند. ربات آنها که در مجله «Biomimetics MDPI» معرفی شده است، ساختار بدنی انعطافپذیری دارد و میتواند حرکات و سبک حرکت مارمولکهای صحرایی را شبیهسازی کند.
محققان در مقاله خود نوشتند: برای کمک به ماموریتهای جاهطلبانه بدونسرنشین به مریخ، انواع خاصی از سیارهنوردها برای انجام وظایف روی سطح مریخ ساخته شدهاند. با توجه به اینکه سطح این سیاره از خاکهای دانهدار و سنگهایی با اندازههای مختلف تشکیل شده است، مریخ نوردهای معاصر میتوانند در حرکت بر روی خاکهای نرم و بالا رفتن از صخرهها مشکل داشته باشند. برای غلبه بر چنین مشکلاتی، محققان یک ربات خزنده چهارپا با الهام از ویژگیهای حرکتی مارمولک صحرایی ساختهاند.
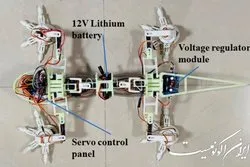
این ربات زیستتقلید ساخته شده توسط گوانجمینگ چن(Guangming Chen) و همکارانش از یک ستون فقرات انعطاف پذیر و چهار پا تشکیل شده است. برای شبیهسازی حرکت مارمولکها، هر پا دارای دو لولا و یک چرخ دنده است که حرکتی نوسانی ایجاد میکند.
برای شبیهسازی حرکات مارمولکها، محققان مجموعهای از مدلهای سینماتیک را برای هر یک از اجزای ربات ایجاد کردند. سپس از این مدلها و محاسبات عددی برای برنامهریزی حرکات ربات استفاده کردند.
محققان در ابتدا ربات خود را در مجموعهای از شبیهسازیها ارزیابی کردند تا مشخص شود که آیا این ربات میتواند به طور موثر حرکات مارمولکها را شبیهسازی کند یا خیر. نتایج آنها بسیار امیدوار کننده بود و آنها دریافتند که این مارمولک رباتیک میتواند حرکات و نحوه راه رفتنی که آنها انتظار دارند را انجام دهد.
چن و همکارانش نمونه اولیه ربات خود را با استفاده از رزین، چاپگر سه بعدی، باتری لیتیومی و سایر قطعات الکترونیکی ساختهاند. آنها از یک بستر آزمایشی شبیهسازی شده برای ارزیابی حرکات نمونه اولیه خود بر روی سطوح سنگی که مشابه زمین مریخ هستند، استفاده کردند.
آنها دریافتند که این ربات میتواند به طور موثر در محیطهای سنگی حرکت کند و این نشان دهندهی پتانسیل آن برای انجام ماموریتهای آینده در سیاره سرخ است. با این حال، پیش از اینکه بتوان آن را جایی در خارج از آزمایشگاه مستقر و آزمایش کرد، محققان باید آن را بیشتر توسعه دهد، به عنوان مثال، یک پوشش محافظ که آن را از خاک یا گرد و غبار موجود در هوا محافظت میکند باید ایجاد شود و بدنه آن با استفاده از مواد مقاومتر ساخته شود.
چن و همکارانش اکنون در حال کار بر روی مدلهای یادگیری ماشینی هستند که به رباتهایشان اجازه میدهد حرکات خود را با مناطق مختلف تطبیق دهند. علاوه بر این، آنها قصد دارند سیستمی را معرفی کنند که منبع انرژی ربات را به طور مداوم تامین میکند.
منبع: خبرگزاری ایسنا

گزارش خطا
آخرین اخبار