۱۶ آذر ۱۴۰۲ - ۱۱:۳۶
نام اولین ماهنورد استرالیا انتخاب شد
پس از برگزاری یک مسابقه برای فرستادن نامهای گوناگون و رایگیری عمومی، اولین ماهنورد استرالیا نامگذاری شد.


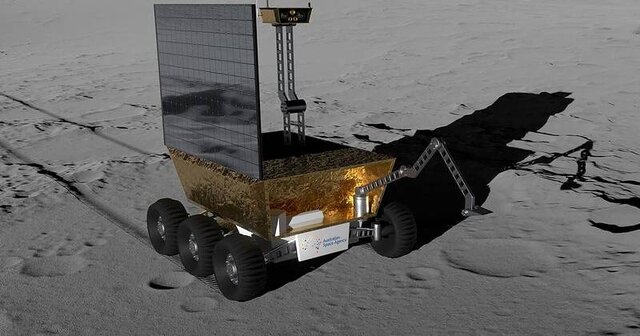
به گزارش ایران اکونومیست و به نقل از اسپیس، اولین ماهنورد استرالیا پس از رایگیری عمومی برای نامگذاری این وسیله نقلیه فضایی، «رو-ور»(Roo-ver) نام گرفت.
«آژانس فضایی استرالیا» در حال ساخت یک ماهنورد نیمهخودکار است که با مشارکت ناسا و برنامه «آرتمیس»(Artemis) این آژانس در اوایل سال ۲۰۲۶ به سوی ماه پرتاب خواهد شد. رو-ور نمونههای خاک ماه را جمعآوری میکند که ناسا قصد دارد از آنها اکسیژن استخراج کند. این یک گام کلیدی در جهت ایجاد حضور پایدار انسان روی ماه و تولید سوخت موشک برای پشتیبانی از ماموریتهای آینده به مریخ است.
نام رو-ور از میان بیش از ۸۰۰۰ نام فرستادهشده به مسابقه نامگذاری ماهنورد استرالیا انتخاب شد.
بیشتر بخوانید:
برگزاری یک مسابقه برای نامگذاری ماهنورد استرالیا
فهرست کوتاه اسامی که نامهایی مانند «کولامون»(Coolamon)، «کاکیرا»(Kakirra)، «میتشیپ»(Mateship) را نیز در بر داشت، بین ۲۰ نوامبر و اول دسامبر در معرض رأیگیری عمومی قرار گرفت و حدود ۲۰ هزار استرالیایی به نام مورد علاقه خود رأی دادند.
«سیوا»(Siwa) یک شرکتکننده از نیو ساوت ولز که نام رو-ور را ارائه کرد، در بیانیه منتشرشده توسط آژانس فضایی استرالیا گفت: ماهنورد ما شایسته نامگذاری از روی یک نماد استرالیایی است که روحیه استرالیایی ما را در این تلاش جدید برای پرتاب نشان دهد. کانگورو بخشی از نشان ملی استرالیاست و زمان آن فرا رسیده است که علم استرالیا جهش بعدی را تا رسیدن به فضا انجام دهد.
انتظار میرود رو-ور که وزن آن تقریبا ۲۰ کیلوگرم است، در نزدیکی قطب جنوب ماه فرود بیاید و تقریبا نیمی از یک روز قمری (۱۴ روز زمینی) را به جستوجوی سطح ماه بپردازد تا خاک ماه موسوم به رگولیت را جمعآوری کند. سپس، ناسا تلاش خواهد کرد تا با استفاده از تجهیزات جداگانهای که همراه ماهنورد به ماه فرستاده خواهند شد، اکسیژن را از نمونهها استخراج کند.
اگرچه این ماهنورد تا حد زیادی از راه دور و از زمین کار خواهد کرد اما توانایی انجام دادن برخی از وظایف قمری را به تنهایی خواهد داشت. این کار به محافظت کردن از ماهنورد در صورت تداخل یافتن شرایط ناملایم محیط ماه با ارتباطات کمک خواهد کرد.
دو ائتلاف روی طراحی ماهنورد کار میکنند که یکی از آنها «AROSE» نام دارد. «نیوتن کمپبل»(Newton Campbell) مدیر برنامههای فضایی AROSE گفت: وقتی در مورد ماه صحبت میکنیم، ممکن است منظور ما فقط چند ثانیه تاخیر باشد که به دلیل فاصله از زمین است. مشکلات سیگنال اضافی ممکن است براساس تعدادی از عوامل مانند تداخل الکترومغناطیسی ناشی از تابش خورشیدی رخ دهند. بنابراین، باید جنبههایی از خودکار بودن معرفی شوند که در زمان تأخیر قابل توجه، به طور مؤثر به هدایت ربات کمک کنند. هدف این است که کار ادامه یابد و اطمینان حاصل شود که ماهنورد ایمنی خود و محیط زیست را حفظ میکند.
منبع: خبرگزاری ایسنا

گزارش خطا
آخرین اخبار