۰۱ دی ۱۴۰۱ - ۰۹:۰۷
ربات ۳ پا مسئول نگهداری از فضاپیماها میشود
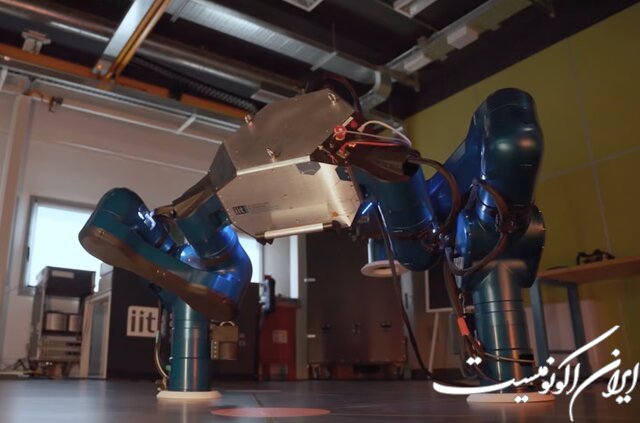
ربات سه پای «MARM» ممکن است به زودی به فضاپیماهای حاضر در مدار ملحق شود.

به گزارش ایران اکونومیست و به نقل از نیواطلس، علاقهمندان به داستانهای علمی و تخیلی ممکن است رباتهای دو پا را از فیلم بیصدا دویدن(Silent Running) در سال ۱۹۷۲ به یاد بیاورند. رباتهایی که تعمیرات خارج از سفینه فضایی را بر عهده داشتند. ربات جدید «MARM» کمی یادآور آنها است با این تفاوت که سه دست و پا دارد.
«MARM» که در حال حاضر نسخه آزمایشی آن وجود دارد توسط گروهی از پژوهشگران در موسسه فناوری ایتالیا(IIT) به رهبری نیکولاس تساگاراکیس (Nikolaos Tsagarakis) ساخته شده است. وی پیش از این، ربات انساننمای آتشنشان «WALK-MAN» را ساخته بود.
«MARM» که نام آن مخفف عبارت «Multi-Arm Relocatable Manipulator» است، به عنوان بخشی از پروژه «MIRROR» آژانس فضایی اروپا توسعه یافته و در حالی که این ربات به طور قابل توجهی میتواند وظایف متنوعی انجام دهد، ابتدا و مهمتر از همه به گونهای طراحی شده که راه خود را به خارج از فضاپیما پیدا کند و کار نصب یا حذف واحدهای مداری را انجام دهد.
به طور خلاصه، این ربات از یک بخش اصلی چرخان و سه اندام مفصلی تشکیل شده که هم به عنوان دست و هم به عنوان پا عمل میکنند.
مکانیسمی در زیر پا یا دستهای ربات، آن را به قطعات عایق 6 ضلعی که قسمت بیرونی بیشتر فضاپیماها را میپوشانند، متصل میکند و «MARM» را به صورت ایمن در جای خود حفظ میکند. در صورت لزوم میتوان از همین مکانیسم برای تعویض قطعات عایق و شارژ باتری ربات و ارسال و دریافت داده از طریق ایستگاههای اتصال در خارج فضاپیما استفاده کرد.
یکی از مزایای طراحی «MARM» این است که با راه رفتن روی سه پا، ربات حداقل دو نقطه تماس را همیشه حفظ خواهد کرد، به علاوه میتواند به راحتی در هر جهتی که نیاز است حرکت کند. علاوه بر این، هنگام استفاده از یک بازو برای انجام فعالیت، دو بازوی دیگر به عنوان لنگر عمل و یک ربات عملیاتی فوق العاده پایدار فراهم میکنند.
به گفته تساگاراکیس، «MARM» در نهایت نیمه خودکار خواهد بود. به عنوان مثال، از دوربینهای داخلی استفاده میکند تا پاهای خود را دقیقا روی هر بخش از عایق خارجی فضاپیماها در حین راه رفتن قرار دهد، اما یک اپراتور انسانی احتمالا هنگام برداشتن و نصب واحدهای تجهیزات آن را راهنمایی میکند. پیشبینی میشود که این ربات به زودی پیش از اینکه در نهایت در یک فضاپیمای واقعی مورد استفاده قرار گیرد در یک شبیهساز فیزیکی آزمایش شود.
منبع: خبرگزاری ایسنا

گزارش خطا
آخرین اخبار