۲۸ تير ۱۴۰۱ - ۱۵:۵۱
ربات مجهز به طناب نخاعی مجازی یک ساعته راه رفت!
محققان آلمانی در مطالعه اخیر خود از توسعه یک ربات مجهز به طناب نخاعی مجازی خبر دادهاند که این ربات یک ساعت پس از قرار گرفتن طناب نخاعی در بدنش، یاد گرفته که چگونه راه برود.
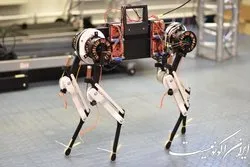
به گزارش ایران اکونومیست و به نقل از اس اف، محققان آلمانی اخیرا از ساخت یک سگ رباتیک دارای واکنشهای غیرارادی(reflexes) که راه رفتن را در عرض یک ساعت فراگرفته، خبر دادهاند. محققان آلمانی میگویند، این سگ رباتیک که مورتی(Morti) نام دارد، راه رفتن سریع را یاد میگیرد زیرا از طناب نخاعی مجازی خود به خوبی استفاده میکند.
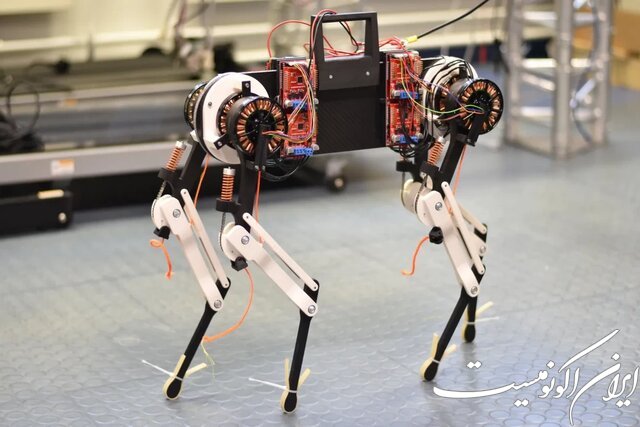
محققان آلمانی این سگ چهار پا را که به سرعت یاد میگیرد، ساختند تا اطلاعات بیشتری در مورد چگونگی یادگیری راه رفتن ذاتی حیوانات پیدا کنند. حیوانات از بدو تولد از شبکههای ماهیچهای هماهنگی در نخاع برخوردار هستند، اما یادگیری دقیق نحوه استفاده از ماهیچهها و تاندونهای پا ممکن است زمان بر باشد.
حیوانات در زمان کودکی دارای واکنشهای نخاعی غیر ارادی هستند که این واکنشهای غیر ارادی کنترل حرکتی اولیه، از حرکاتی مانند جلوگیری از افتادن در اولین تلاشهای خود برای راه رفتن جلوگیری کند. با بزرگتر شدن حیوانات و زمانی که سیستم عصبی با ماهیچهها و تاندونهای پای حیوان سازگار شود، حیوانات بر ماهیچههای خود کنترل بیشتری خواهند داشت.
این سگ رباتیک با استفاده از الگوریتم پیچیدهای کار میکند که این الگوریتم به او در یادگیری کارهایی مانند راه رفتن و واکنش نشان دادن کمک میکند. اطلاعات حسگرهای پا با دادههای حاصل از مدل نخاعی که به عنوان یک برنامه در رایانه ربات اجرا میشود، مطابقت دارد. این سگ رباتیک با مقایسه مداوم اطلاعات حسگر تنظیم شده، اجرای حلقههای بازتابی و تطبیق روش تنظیم حرکات خود، راه رفتن را یاد میگیرد. الگوریتم مذکور، پارامترهای کنترلی یک مولد الگوی مرکزی(CPG) را با دیگر اجزا تطبیق میدهد.
در انسان و حیوان، شبکههایی از نورونها در نخاع وجود دارند که انقباضات دورهای عضلانی را بدون اطلاعات ورودی مغز ایجاد میکنند. شبکههای مولد این الگو به ما کمک میکنند راه برویم، پلک بزنیم و غذا را هضم کنیم.
رفلکسها/ واکنش غیرارادی(Reflexes) اعمال غیرارادی هستند که توسط مسیرهای رمزگذاری شدهای ایجاد میشوند و حسگرهای موجود در پا را به نخاع متصل میکنند. تا زمانی که یک حیوان روی یک سطح کاملا صاف راه میرود، این مولدهای الگو میتوانند برای کنترل سیگنالهای حرکتی از نخاع کافی باشند. یک برآمدگی کوچک راه رفتن را تغییر میدهد، رفلکسها وارد میشوند و ممکن است موجود مجبور شود الگوهای حرکتی خود را تغییر دهد تا از افتادن جلوگیری کند. این تغییرات برگشت پذیر و الاستیک هستند و الگوهای حرکتی پس از اختلال به ساختار اولیه خود باز میگردند.
اگر حیوان به رغم رفلکسهای فعال، دست از لغزش نکشد، الگوهای حرکتی باید دوباره یاد بگیرند و غیرقابل برگشت شوند. در یک حیوان تازه متولد شده، این مولدهای الگو هنوز به اندازه کافی تنظیم نشدهاند و حیوان در زمینهای هموار و ناهموار تلو تلو میخورد. اما پس از مدتی موجود به سرعت یاد میگیرد که چگونه ژنراتورها و شبکههای الگوی عضلات، پا و تاندونها را کنترل کنند. همین امر در مورد ربات نیز صادق است، اما ربات حرکات خود را حتی سریعتر از یک حیوان یاد میگیرد.
ژنراتورهای الگوی مورتی بر روی یک رایانه کوچک و سبک شبیهسازی شدهاند که این امر حرکت پاهای ربات را کنترل میکند. این نخاع مجازی در پشت ربات چهارپا در جایی که سر قرار میگیرد تعبیه شده است. در طول زمانی که ربات به آرامی راه میرود، دادههای حسگر از پای ربات توسط مولد الگوی ربات مقایسه میشود. اگر ربات زمین بخورد، الگوریتم میزان چرخش پاها به جلو و عقب، سرعت چرخش پاها و مدت زمان قرار گرفتن یک پا روی زمین را تغییر میدهد. همانطور که ربات یاد میگیرد، مولد الگو، سیگنالهای موتوری را ارسال میکند تا کمتر تلو تلو بخورد و راه رفتن را بیاموزد.
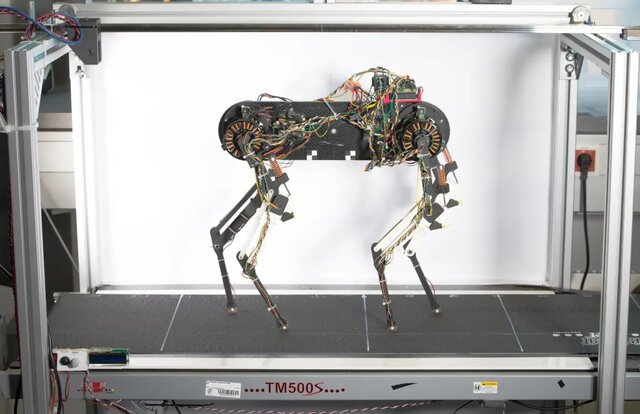
"فلیکس روپرت"(Felix Ruppert) نویسنده اول این مطالعه از موسسه سیستمهای هوشمند ماکس پلانک در اشتوتگارت در این باره گفت: مولد الگوی مرکزی، شبیه هوش راه رفتن خودکار درونی است که در حیوانات وجود دارد که ما آن را در ربات ایجاد کردهایم. این رایانه سیگنالهایی تولید میکند که موتورهای پا را کنترل میکند و ربات در ابتدا راه میرود و تلو تلو میخورد. دادهها از حسگرها به نخاع مجازی و جایی که دادههای حسگر و مولد الگوی مرکزی با هم مقایسه میشوند، برمیگردند. اگر دادههای حسگر با دادههای مورد انتظار مطابقت نداشته باشد، الگوریتم یادگیری تا زمانی که ربات به خوبی و بدون زمین خوردن راه برود، رفتار راه رفتن را تغییر میدهد. تغییر خروجی مولد الگوی مرکزی با فعال نگه داشتن رفلکسها و نظارت بر تلو تلو خوردن ربات، بخش اصلی فرآیند یادگیری است. این یک تحقیق بنیادی درمورد رابطه بین رباتیک و زیست شناسی است و مدل رباتیک ما به سوالاتی پاسخ میدهد که زیست شناسی به تنهایی نمیتواند به آنها پاسخ دهد.
نویسندگان در انتها اظهار کردند ربات آنها برای سیاره ما نیز خوب است زیرا تنها به پنج وات نیرو برای راه رفتن نیاز دارد.
یافتههای این مطالعه مجله Nature Machine Intelligence منتشر شده است.
منبع: خبرگزاری ایسنا

گزارش خطا
آخرین اخبار