۲۳ آذر ۱۳۹۵ - ۰۹:۳۱
بهبود 90 درصدی حرکت در بیماران ضایعات نخاعی با ربات پوشیدنی
گروهی از محققان دانشگاه صنعتی شریف ربات پوشیدنی کمک حرکتی برای آرنج و مچ دست بیماران ضایعه نخاعی طراحی کردند که نتایج تست بالینی نشان از بهبود حرکتی 90 درصدی این بیماران داشته است.
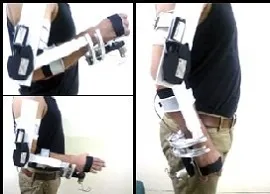

به گزارش ایران اکونومیست؛ اسماعیل محمدی فلاورجانی از محققان این طرح با بیان اینکه این ابزار یک ربات کمک حرکتی است، گفت: هدف از طراحی و ساخت این ربات، کمک به دست بیماران مبتلا به ضایعه نخاعی و یا افرادی است که دست آنها به دلایل مختلف در حرکت مفصل آرنج و مچ ناتوان شده و بازه حرکتی آن در حد چندین درجه است.
وی اضافه کرد: بیماران دچار ضایعات نخاعی با پوشیدن این ربات و حرکت دست، مسیر حرکت را تشخیص و ادامه حرکت را انجام خواهد داد. این عمل باعث تحریک اعصاب و جلوگیری از تنبل شدن عضلات درگیر شده و به مرور زمان موجب افزایش بازه حرکتی آرنج و مچ میشود.
این محقق ادامه داد: این ربات به بدن این بیماران متصل میشود و ورودی سیگنالهای مغزی را از طریق عضلات دست دریافت و شروع به حرکت ربات به جهتهای مورد نظر بیمار میکند.
محمدی خاطرنشان کرد: ادامه این روند موجب خواهد شد تا اعصاب ماهیچهها تحریک شود و با گذشت زمان اعصاب حرکتی به وضعیت نرمال خود بازگردد.
این محقق با تاکید بر اینکه این ربات نمونه خارجی ندارد، بومیسازی و کاهش قیمتها را از مزایای این ربات ذکر کرد و یادآور شد: قابل حمل بودن از دیگر ویژگیهای این ربات است؛ به این معنا که بیمار برای استفاده از این ربات میتواند با مراجعه به مراکز توانبخشی در صورتی که قادر به خرید باشد، آن را تهیه کند و در غیر این صورت میتواند از این ربات در این مراکز بهرهمند شوند.
محمدی با تاکید بر اینکه این دستگاه به صورت تعاملی طراحی شده است، اظهار کرد: در نمونههای خارجی به صورت خودکار اقدام به حرکت دادن اعضای بدن بیمار میشود که این امر خستگی بیماران را به همراه دارد و ممکن است بیمار خواب آلود شود، ولی این ربات طراحی شده در دانشگاه شریف، حرکت ورودی خود را از بیمار دریافت میکند.
وی اضافه کرد: این ربات به بیمار اعلام میکند که دست خود را به حرکت درآورد و با اقدام بیمار برای حرکت، ربات به کمک بیمار میآید. این امر موجب بروز هیجان در بیمار برای به حرکت درآوردن اندام خود خواهد شد.
این محقق با تاکید بر اینکه این ربات به تولید نیمهصنعتی رسیده است، یادآور شد: این ربات در برخی از مراکز توانبخشی چون کلینیک توانبخشی اسما کاربردی شده و حدود 25 بیمار با استفاده از این ربات مورد آزمون قرار گرفتند و نتایج نشان داد که این بیماران به بهبودی بالای 90 درصد رسیدهاند.
محمدی با تاکید بر اینکه این ربات برای اندام بالاتنه و برای دو دست کاربرد دارد، اضافه کرد: اساس عملکرد این ربات سیگنالهای عضلانی که از مغز بیمار صادر میشود، است؛ از این رو حتی در صورتی که دست فردی قطع شده باشد، میتوان از این ربات به عنوان پروتز استفاده کرد، به این صورت که آن را به اندامهای بالایی دست که اعصاب از آنجا عبور کرده متصل کنیم، در این صورت در هنگام فکر کردن فرد به حرکت دادن دست خود، ربات این عمل را انجام میدهد.
وی با بیان اینکه این ربات پوشیدنی با 7 درجه آزادی دست طراحی شده است، اضافه کرد: اساس الگوریتم کنترلی این ربات بر پایه حرکت دست بیمار است و سادگی و نوع روش کنترل، طراحی منحصر به فرد و قابل حمل بودن آن برای انواع بیمارن ضایعه نخاعی و سکته مغزی، از ویژگیهای بارز این ربات بشمار میرود.
به گفته این محقق، ربات دارای چندین مد حرکتی است و اساس الگوریتم کنترل آن بر پایه درک تمایل حرکتی انسان است، به گونهای که حرکت دست بیمار به عنوان ورودی و مقاومت آن در برابر حرکت برای توقف تعریف شده است.
محمدی فلاورجانی خاطرنشان کرد: کاربر با اندکی حرکت دست در راستای مفاصل شانه، آرنج و مچ، ربات مسیر حرکت را توسط انکودرهای نصب شده در راستای مفاصل تشخیص و ادامه حرکت را انجام میدهد و با کمی مقابله در برابر حرکت، با خواندن سنسور جریان و تبدیل آن به گشتاور مقاومتی ربات باز میایستد.
طرح «ساخت و کنترل ربات پوشیدنی کمک توانبخشی دست بر پایه سیگنالهای عضلانی» از سوی اسماعیل محمدی فلاورجانی و محمد علی اسماعیلی و با راهنمایی دکتر حسن ظهور، دکتر فرزام فرهمند، دکتر سعید بهزادیپور و دکتر مریم فرزاد در دانشگاه شریف اجرایی شد و در هجدهمین جشنواره جوان خوارزمی حائز رتبه دوم پژوهشهای کاربردی شد.
وی اضافه کرد: بیماران دچار ضایعات نخاعی با پوشیدن این ربات و حرکت دست، مسیر حرکت را تشخیص و ادامه حرکت را انجام خواهد داد. این عمل باعث تحریک اعصاب و جلوگیری از تنبل شدن عضلات درگیر شده و به مرور زمان موجب افزایش بازه حرکتی آرنج و مچ میشود.
این محقق ادامه داد: این ربات به بدن این بیماران متصل میشود و ورودی سیگنالهای مغزی را از طریق عضلات دست دریافت و شروع به حرکت ربات به جهتهای مورد نظر بیمار میکند.
محمدی خاطرنشان کرد: ادامه این روند موجب خواهد شد تا اعصاب ماهیچهها تحریک شود و با گذشت زمان اعصاب حرکتی به وضعیت نرمال خود بازگردد.
این محقق با تاکید بر اینکه این ربات نمونه خارجی ندارد، بومیسازی و کاهش قیمتها را از مزایای این ربات ذکر کرد و یادآور شد: قابل حمل بودن از دیگر ویژگیهای این ربات است؛ به این معنا که بیمار برای استفاده از این ربات میتواند با مراجعه به مراکز توانبخشی در صورتی که قادر به خرید باشد، آن را تهیه کند و در غیر این صورت میتواند از این ربات در این مراکز بهرهمند شوند.
محمدی با تاکید بر اینکه این دستگاه به صورت تعاملی طراحی شده است، اظهار کرد: در نمونههای خارجی به صورت خودکار اقدام به حرکت دادن اعضای بدن بیمار میشود که این امر خستگی بیماران را به همراه دارد و ممکن است بیمار خواب آلود شود، ولی این ربات طراحی شده در دانشگاه شریف، حرکت ورودی خود را از بیمار دریافت میکند.
وی اضافه کرد: این ربات به بیمار اعلام میکند که دست خود را به حرکت درآورد و با اقدام بیمار برای حرکت، ربات به کمک بیمار میآید. این امر موجب بروز هیجان در بیمار برای به حرکت درآوردن اندام خود خواهد شد.
این محقق با تاکید بر اینکه این ربات به تولید نیمهصنعتی رسیده است، یادآور شد: این ربات در برخی از مراکز توانبخشی چون کلینیک توانبخشی اسما کاربردی شده و حدود 25 بیمار با استفاده از این ربات مورد آزمون قرار گرفتند و نتایج نشان داد که این بیماران به بهبودی بالای 90 درصد رسیدهاند.
محمدی با تاکید بر اینکه این ربات برای اندام بالاتنه و برای دو دست کاربرد دارد، اضافه کرد: اساس عملکرد این ربات سیگنالهای عضلانی که از مغز بیمار صادر میشود، است؛ از این رو حتی در صورتی که دست فردی قطع شده باشد، میتوان از این ربات به عنوان پروتز استفاده کرد، به این صورت که آن را به اندامهای بالایی دست که اعصاب از آنجا عبور کرده متصل کنیم، در این صورت در هنگام فکر کردن فرد به حرکت دادن دست خود، ربات این عمل را انجام میدهد.
وی با بیان اینکه این ربات پوشیدنی با 7 درجه آزادی دست طراحی شده است، اضافه کرد: اساس الگوریتم کنترلی این ربات بر پایه حرکت دست بیمار است و سادگی و نوع روش کنترل، طراحی منحصر به فرد و قابل حمل بودن آن برای انواع بیمارن ضایعه نخاعی و سکته مغزی، از ویژگیهای بارز این ربات بشمار میرود.
به گفته این محقق، ربات دارای چندین مد حرکتی است و اساس الگوریتم کنترل آن بر پایه درک تمایل حرکتی انسان است، به گونهای که حرکت دست بیمار به عنوان ورودی و مقاومت آن در برابر حرکت برای توقف تعریف شده است.
محمدی فلاورجانی خاطرنشان کرد: کاربر با اندکی حرکت دست در راستای مفاصل شانه، آرنج و مچ، ربات مسیر حرکت را توسط انکودرهای نصب شده در راستای مفاصل تشخیص و ادامه حرکت را انجام میدهد و با کمی مقابله در برابر حرکت، با خواندن سنسور جریان و تبدیل آن به گشتاور مقاومتی ربات باز میایستد.
طرح «ساخت و کنترل ربات پوشیدنی کمک توانبخشی دست بر پایه سیگنالهای عضلانی» از سوی اسماعیل محمدی فلاورجانی و محمد علی اسماعیلی و با راهنمایی دکتر حسن ظهور، دکتر فرزام فرهمند، دکتر سعید بهزادیپور و دکتر مریم فرزاد در دانشگاه شریف اجرایی شد و در هجدهمین جشنواره جوان خوارزمی حائز رتبه دوم پژوهشهای کاربردی شد.

گزارش خطا
آخرین اخبار